
心血管系统是惊人的。它利用我们静脉和动脉循环的血液将氧气和营养输送到身体的每个组织。在EPFL,博士生Lucio Pancaldi和助理教授Selman Sakar决定利用流体动能(液体运动产生的机械能)到达人体的各个部位,而不是诉诸侵入性方法。Sakar说:“由于现有的工具都很笨重,所以大脑的很大一部分仍然无法使用,而在不造成组织损伤的情况下探索微小、复杂的脑血管系统是极其困难的。”
血管内设备小型化
医生可以通过推动和旋转导丝,然后滑动被称为导管的空心管进入病人的动脉。然而,当动脉开始变窄时,尤其是在大脑,这种先进的技术揭示了它的局限性。EPFL微生物机器人系统(microbioroboicsystems, MICROBS)实验室的科学家们与Diego Ghezzi教授团队的同事合作,设计了栓系式显微设备,可以以前所未有的速度和轻松地进入毛细血管。Pancaldi说:“我们的技术并不是要取代传统的导管,而是要增强它们的功能。”钓鱼的答案
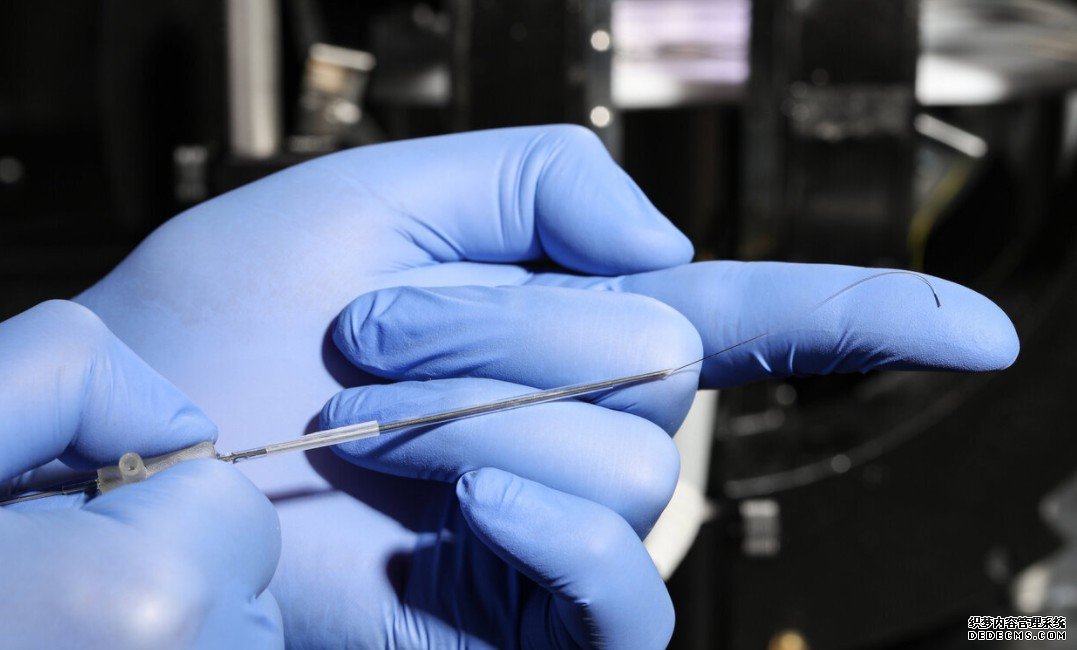
该装置包括一个磁头和一个由生物相容性聚合物制成的超柔韧体。“想象一下,一个鱼钩逐渐被放进河里。它会被水流冲走。我们只需要抓住设备的一端,让血液把它拖到最外围的组织。我们在分岔处轻轻旋转设备的磁头,以选择特定的路径。”Pancaldi说。由于没有机械力直接作用于血管壁,造成任何损伤的风险非常低。此外,控制血液流动可以将手术时间从几个小时减少到几分钟。
绘制血管系统的路径
设备的释放和磁转向都在计算机控制下。此外,由于装置的尖端不推动血管壁,因此不需要力反馈。“我们可以设想,手术机器人将利用患者的核磁共振和CT扫描提供的血管系统详细地图,自动引导设备到目标位置。机器智能的加入将改变血管内手术。此外,计算机程序可能会利用荧光镜提供的视觉信息来定位设备,并实时计算轨迹,
杏耀平台的价值观 ,以方便手动操作。”Sakar说。
EPFL工程学院的研究人员在人造微血管系统中测试了该设备。下一阶段将使用最先进的医学成像系统在动物身上进行测试。科学家们还希望开发出具有一系列机载执行器和传感器的其他设备。



