动物在它们的自然环境中毫不费力地变换它们的行动,以捕猎,躲避捕食者,每天带着它们的背包旅行。
通过追赶蟑螂穿越障碍物并研究它们的运动,约翰斯·霍普金斯大学的工程师们发现,动物的运动转换对应于克服势能障碍,它们可以在复杂的地形中抖动来穿越障碍物。
研究结果的报告将于6月15日发表在《美国国家科学院院刊》上。
“我们的发现将有助于使机器人在现实世界中更加健壮,并拓宽它们的运动范围,”物理学家、约翰·霍普金斯大学机械工程助理教授、该论文的高级作者陈丽说。
李说,随着移动机器人即将融入社会,它们能够轻松高效地在周围的世界中移动非常重要。而自动驾驶汽车等移动机器人导航和机器人真空吸尘器已经出色的平面和行动之间的过渡(如前进、转弯和停止避免障碍)周围的障碍,很多重要的使用,如在废墟中搜救,检查和监测建筑和空间探索通过岩石要求机器人身体与地形导线,而不是简单地避免障碍物。
该研究的第一作者、李实验室的研究生Ratan Othayoth说:“搜救机器人不能仅仅通过避开障碍物来操作,就像真空机器人会试图避开沙发一样。”
“这些机器人必须穿过碎石,要做到这一点,它们必须在三维空间中使用不同类型的动作。”
然而,机器人仍在努力做到这一点,因为科学家们还不清楚机器人与复杂地形的物理互动如何影响它在不同动作之间的转换能力。研究人员说,了解动物身上的这一点可以让研究人员制造出更有活力的机器人。
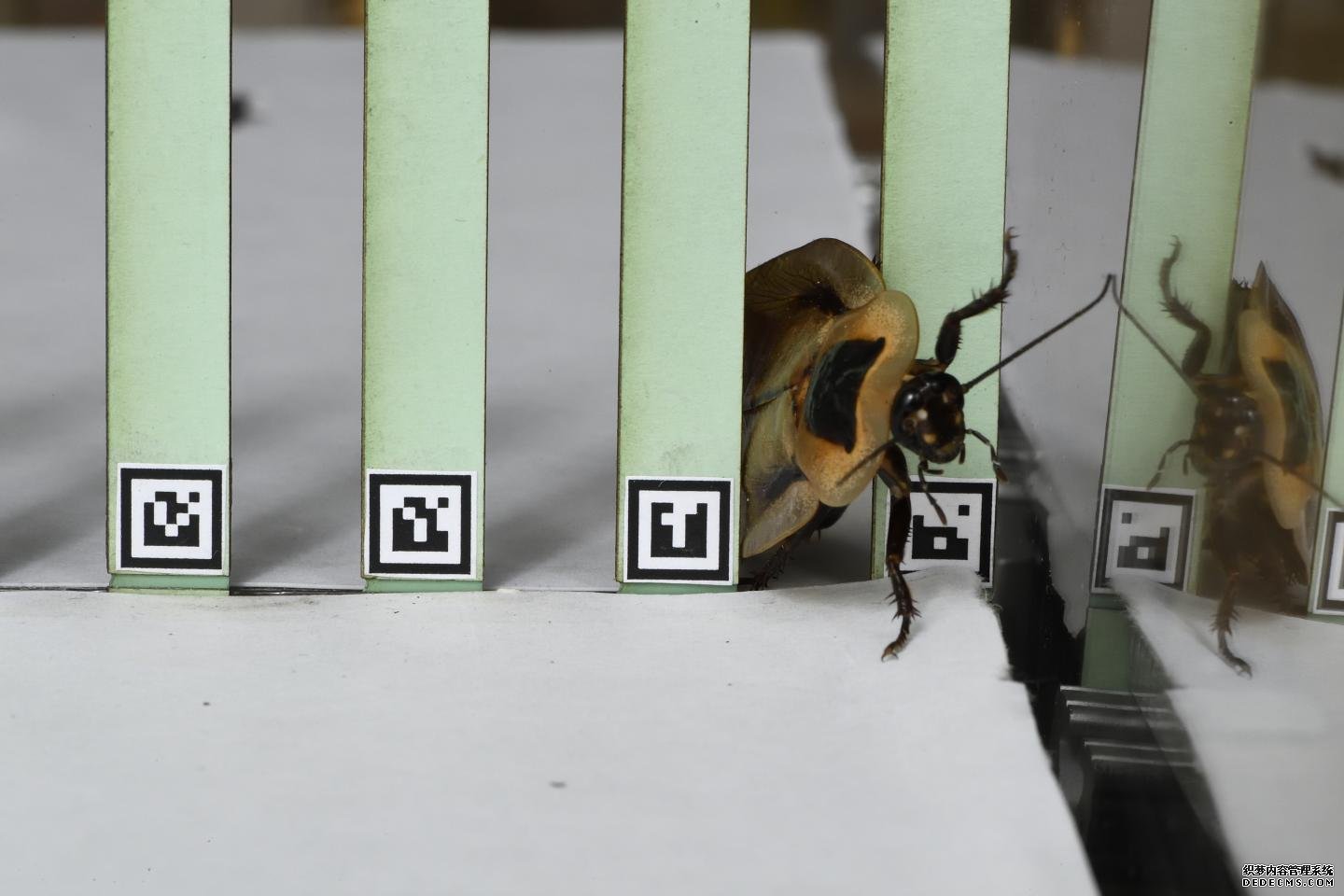
为了研究这个问题,Othayoth设计了一个由“梁”组成的障碍跑道,“梁”是一种高的、可弯曲的板,安装在弹簧上,用来复制柔韧的草叶,
杏耀注册 ,并追踪蟑螂如何在两种3d运动之间转换,从而通过梁。这两种动作是:一种是“摇”,也就是蟑螂抬起身体去推横梁,直到横梁弯曲到一定程度,这是很费力的;和“滚动”,当蟑螂滚进梁之间的缝隙,这是更容易通过。
研究人员用数字技术重建了蟑螂“和光束”的三维运动,以观察它们的俯仰和翻滚运动在势能图上的表现——这是一张显示动物“和光束”的总势能随着动物身体向光束移动和旋转而变化的地图。这张图描述了重力和作用在动物身上的弹性弯曲力的联合作用,就像重力场或电场可以描述作用在质点或电荷上的力一样。不同之处在于,这种动物是自我推进的,并且会受到额外的摩擦力和阻尼力,这增加了最终运动的复杂性。
这一能量景观表明,从俯仰到滚动运动的转变是在景观上从一个能量“盆地”向另一个能量“盆地”的转变。
“想象你有一个碗,在里面放一个弹珠。大理石会进入碗底,那里是它最稳定的地方。每一次蟑螂做一个动作,它们就会被拉到碗的底部,”李解释道。“我们发现,每种运动都可以用一个这样的碗来描述。”
“现在想象你有两个碗。当蟑螂从投球动作转变为翻滚动作时,就好像它们从一个碗的底部跳到另一个碗的底部。”
这表明,为了从一种运动过渡到另一种,昆虫必须克服第一个碗的侧面,换句话说,杏耀信任度有足够的能量克服能量障碍。
研究人员发现,蟑螂抖动的腿会让身体抖动,从而给它足够的能量来克服障碍,从更费力的音调转变为更容易的翻滚动作,从而促进横越。
该团队还制造了一个机器人来模仿蟑螂的行为,并进一步改变了它的紧张程度。机器人越抖动,它克服能量障碍所需要的能量就越多,从推动横梁到滚入间隙再穿过。
这些结果解释了为什么有腿的机器人(比如RHex,一种已经存在了几十年的六条腿机器人,在流行媒体上随处可见)在穿越大型障碍物时表现得惊人地好,即使不使用任何传感器或仔细的运动规划。
“这种‘摇一摇自己’的策略是最天真的转变方式,杏耀的安全”李说。“动物可以——机器人也应该——添加更仔细、更主动的调整,以做得更好。这是我们下一步要研究的。”
李和他的团队说,这种能源景观的新方法阐明了动物是如何利用物理互动在不同类型的运动之间转换的,并将指导机器人更好地穿越像地震废墟这样复杂的三维地形。
“如果成功,框架由李教授的团队将是一个跳跃在我们的能力,实现快速、健壮的机器人能够巧妙地谈判凌乱的地形,”塞缪尔·斯坦顿说,项目经理,陆军研究办公室,美国陆军作战能力发展的一个元素命令陆军研究实验室。